pygimli.physics.gravimetry#
Solve gravimetric and magneto static problems in 2D and 3D analytically
Overview#
Functions
|
Vertical magnetic gradient for polygon. |
|
Magnetic anomaly for a horizontal cylinder. |
|
Magnetic anomaly for a sphere. |
|
Solve gravity and/or magnetics problem after Holstein (1997). |
|
Return Li&Oldenburg like depth weighting of boundaries or cells. |
|
TODO WRITEME. |
|
TODO WRITEME. |
|
TODO WRITEME. |
|
2D Gradient of gravimetric potential of horizontal cylinder. |
|
Gravitational field od a horizontal half plate. |
|
Gravitational field of a sphere. |
|
Compute magnetic field according to eq. |
|
Solve gravimetric response. |
|
Gravitational potential of horizonzal cylinder. |
|
Gravitational potential of a sphere. |
Classes
|
Magnetics modelling operator using Holstein (2007). |
|
Gravimetry modelling operator. |
|
Magnetics Manager. |
|
Magnetics modelling operator using Holstein (2007). |
|
Remanent magnetics modelling operator for arbitrary magnetization. |
Functions#
- pygimli.physics.gravimetry.BZPoly(pnts, poly, mag, openPoly=False)[source]#
Vertical magnetic gradient for polygon.
- Parameters:
pnts (list) – Measurement points [[p1x, p1z], [p2x, p2z],…]
poly (list) – Polygon [[p1x, p1z], [p2x, p2z],…]
mag ([M_x, M_y, M_z]) – Magnetization = [M_x, M_y, M_z]
- pygimli.physics.gravimetry.BaZCylinderHoriz(pnts, R, pos, M)[source]#
Magnetic anomaly for a horizontal cylinder.
Calculate the vertical component of the anomalous magnetic field Bz for a buried horizontal cylinder at position pos with radius R for a given magnetization M at measurement points pnts.
TODO .. only 2D atm
- Parameters:
pnts ([[x,z], ]) – measurement points – array[x,y,z]
R (float) – radius
pos ([float, float]) – [x,z] – sphere center
M ([float, float]) – [Mx, Mz] – magnetization
- pygimli.physics.gravimetry.BaZSphere(pnts, R, pos, M)[source]#
Magnetic anomaly for a sphere.
Calculate the vertical component of the anomalous magnetic field Bz for a buried sphere at position pos with radius R for a given magnetization M at measurement points pnts.
- Parameters:
pnts ([[x,y,z], ]) – measurement points – array[x,y,z]
R (float) – radius
pos ([float, float, float]) – [x,y,z] – sphere center
M ([float, float, float]) – [Mx, My, Mz] – magnetization
- pygimli.physics.gravimetry.SolveGravMagHolstein(*args, **kwargs)#
Solve gravity and/or magnetics problem after Holstein (1997).
- Parameters:
mesh (pygimli:mesh) – tetrahedral or hexahedral mesh
pnts (list|array of (x, y, z)) – measuring points
cmp (list of str) – component list of type str, valid values are: gx, gy, gz, TFA, Bx, By, Bz, Bxx, Bxy, Bxz, Byy, Byz, Bzz
igrf (list|array of size 3 or 7) –
international geomagnetic reference field, either [D, I, H, X, Y, Z, F] - declination, inclination, horizontal field,
X/Y/Z components, total field OR
[X, Y, Z] - X/Y/Z components
- Returns:
out – kernel matrix to be multiplied with density or susceptibility
- Return type:
ndarray (nPoints x nComponents x nCells)
- pygimli.physics.gravimetry.depthWeighting(mesh, z0: float = 25, height: float = 0, power: float = 1.5, normalize: bool = False, cell: bool = False)[source]#
Return Li&Oldenburg like depth weighting of boundaries or cells.
To account for inherent ambiguity in potential field methods, a depth weighting of the regulariation term is often applied in inversion, going back to Li & Oldenburg (1996, eq. 18):
\[w(z) = \frac{1}{(z+z_0)^{3/2}}\]Here, we reformulate the original equation in order to make it unitless:
\[w(z) = \frac{1}{(z/z_0+1)^p}\]Which is the same as before except a factor that can go into the regularization strength. The function describes a decay with depth, starting from w(0)=1 and approaching w(z)=0 for z>>z0. z is the depth of a boundary or cell below the sensor and is determined by its mesh center and the sensor position.
- Parameters:
z0 (float [25]) – centroid depth (w(z0)=1/2^p)
height (float) – sensor height to be added to depth
power (float [1.5]) – exponent
normalize (bool [False]) – normalize such that the mean weight is 1 (like unweighted)
cell (bool [True]) – use cell center (for cType=0|2|geostat) instead of boundary (cType=1)
- Return type:
depth weighting vector for all interior boundaries or all cells
- pygimli.physics.gravimetry.gradGZCylinderHoriz(r, a, rho, pos=(0.0, 0.0))[source]#
TODO WRITEME.
\[g = -grad u(r), with r = [x,z], |r| = \sqrt{x^2+z^2}\]- Parameters:
r (list[[x, z]]) – Observation positions
a (float) – Cylinder radius in [meter]
rho – Density in [kg/m^3]
- Return type:
grad gz, [gz_x, gz_z]
Examples using pygimli.physics.gravimetry.gradGZCylinderHoriz
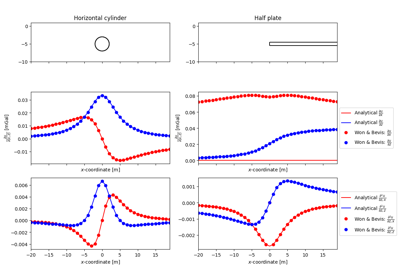
- pygimli.physics.gravimetry.gradGZHalfPlateHoriz(pnts, t, rho, pos=(0.0, 0.0))[source]#
TODO WRITEME.
\[g = -\nabla u\]- Parameters:
pnts (array (\(n\times 2\))) – n 2 dimensional measurement points
t (float) – Plate thickness in \([\text{m}]\)
rho (float) – Density in \([\text{kg}/\text{m}^3]\)
- Returns:
gz – Gradient of z-component of g \(\nabla(\frac{\partial u}{\partial\vec{r}}_z)\)
- Return type:
array
Examples using pygimli.physics.gravimetry.gradGZHalfPlateHoriz
- pygimli.physics.gravimetry.gradGZSphere(r, rad, rho, pos=(0.0, 0.0, 0.0))[source]#
TODO WRITEME.
\[g = -\nabla u\]- Parameters:
r ([float, float, float]) – position vector
rad (float) – radius of the sphere
rho (float) – density in [kg/m^3]
- Return type:
[d g_z /dx, d g_z /dy, d g_z /dz]
- pygimli.physics.gravimetry.gradUCylinderHoriz(r, a, rho, pos=(0.0, 0.0))[source]#
2D Gradient of gravimetric potential of horizontal cylinder.
\[g = -G[m^3/(kg s^2)] * dM[kg/m] * 1/r[1/m] * grad(r)[1/1] = [m^3/(kg s^2)] * [kg/m] * 1/m * [1/1] == m/s^2\]- Parameters:
r (list[[x, z]]) – Observation positions
a (float) – Cylinder radius in [meter]
pos ([x,z]) – Center position of cylinder.
rho (float) – Delta density in [kg/m^3]
- Returns:
g – Gradient of gravimetry potential [mGal].
- Return type:
[dudx, dudz]
Examples using pygimli.physics.gravimetry.gradUCylinderHoriz
- pygimli.physics.gravimetry.gradUHalfPlateHoriz(pnts, t, rho, pos=(0.0, 0.0))[source]#
Gravitational field od a horizontal half plate.
\[g = -grad u,\]- Parameters:
pnts
t
rho – Density in [kg/m^3]
- Returns:
z-component of g .. math:: nabla(partial u/partialvec{r})_z
- Return type:
gz
Examples using pygimli.physics.gravimetry.gradUHalfPlateHoriz
- pygimli.physics.gravimetry.gradUSphere(r, rad, rho, pos=(0.0, 0.0, 0.0))[source]#
Gravitational field of a sphere.
\[g = -G[m^3/(kg s^2)] * dM[kg] * 1/r^2 1/m^2] * \grad(r)[1/1] = [m^3/(kg s^2)] * [kg] * 1/m^2 * [1/1] == m/s^2\]- Parameters:
r ([float, float, float]) – position vector
rad (float) – radius of the sphere
rho (float) – density in [kg/m^3]
- Returns:
[gx, gy, gz] – gravitational acceleration (note that gz points negative)
- Return type:
[float*3]
- pygimli.physics.gravimetry.magneticDipole(Q, M, P=None, x=None, y=0.0, z=0.0, alpha: float = 0, cylinder: bool = False)[source]#
Compute magnetic field according to eq. (4.14) from Blakely (1996).
The magnetic field \(\vec{B}\) at a point P due to a dipole in Q reads
\[\vec{B}(\vec{r}) = \frac{\mu_0 M}{4\pi r^3} \left[ 3 (\vec{M}' \cdot \vec{r}')\vec{r}' - \vex{M}' \right]\]where \(\vec r=\vec r_P - \vec r_Q\) is the vector between the magnetic moment Q and the measuring point P, \(r'/M'\) are unit vectors of r/M.
- Parameters:
Q (array 3x1) – position of magnetic dipole
M (array 3x1) – magnetization vector
P (array 3xN) – measuring positions
x (array N) – positions as profile
y/z (array | float) – y and z positions
alpha (profile direction (degree)) – profile direction
cylinder (bool [False]) – use line/cylinder instead of point/sphere
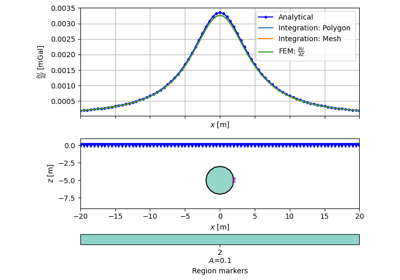
- pygimli.physics.gravimetry.solveGravimetry(mesh, dDensity=None, pnts=None, complete=False)[source]#
Solve gravimetric response.
2D with
pygimli.physics.gravimetry.lineIntegralZ_WonBevis3D with
pygimli.physics.gravimetry.gravMagBoundarySinghGup- Parameters:
mesh (GIMLI::Mesh) – 2d or 3d mesh with or without cells.
dDensity (float | array) –
Density difference.
- float – solve for positive boundary marker only.
Assuming one inhomogeneity.
[[int, float]] – solve for multiple positive boundaries TOIMPL
array – solve for one delta density value per cell
None – return per cell kernel matrix G TOIMPL
pnts ([[x_i, y_i]]) – List of measurement positions.
complete (bool [False]) – If True return whole solution or matrix for [dgx, dgy, dgz]
- Returns:
dg (array OR)
dz, dgz (arrays (if complete))
Examples using pygimli.physics.gravimetry.solveGravimetry
- pygimli.physics.gravimetry.uCylinderHoriz(pnts, rad, rho, pos=None)[source]#
Gravitational potential of horizonzal cylinder.
- Parameters:
pnts (iterable) – measuring point locations
rad (float) – radius of the cylinder
rho (float) – density contrast in kg/m^3
pos ([float, float]) – x,z position of the cylinder axis
- Return type:
gravimetric potential at the given points
- pygimli.physics.gravimetry.uSphere(r, rad, rho, pos=None)[source]#
Gravitational potential of a sphere.
Gravitational potential of a sphere with radius and density at a given position.
\[u = -G * dM * \frac{1}{r}\]- Parameters:
r ([float, float, float]) – position vector
rad (float) – radius of the sphere
rho (float) – density
pos ([float, float, float]) – position of sphere (0.0, 0.0, 0.0)
Classes#
- class pygimli.physics.gravimetry.GravityModelling(mesh, points, cmp=None)[source]#
Bases:
MeshModellingMagnetics modelling operator using Holstein (2007).
- class pygimli.physics.gravimetry.GravityModelling2D(points=None, **kwargs)[source]#
Bases:
MeshModellingGravimetry modelling operator.
- __init__(points=None, **kwargs)[source]#
Initialize forward operator, optional with mesh and points.
You can specify both the mesh and the measuring points, or set the latter after the mesh has been set.
- Parameters:
mesh (pg.Mesh) – mesh for forward computation
points (array[x,y]) – measuring points
- class pygimli.physics.gravimetry.MagManager(data=None, delimiter=None, **kwargs)[source]#
Bases:
MeshMethodManagerMagnetics Manager.
- createGrid(dx: float = 50, depth: float = 800, bnd: float = 0)[source]#
Create a grid.
- Parameters:
dx (float=50) – Grid spacing in x and y direction.
depth (float=800) – Depth of the grid in z direction.
bnd (float=0) – Boundary distance to extend the grid in x and y direction.
- Returns:
mesh – Created 3D structured grid.
- Return type:
- createMesh(boundary: float = 0, area: float = 100000.0, depth: float = 0, quality: float = 1.3, addPLC: Mesh = None, addPoints: bool = True, frame: float = 0)[source]#
Create an unstructured 3D mesh.
- Parameters:
boundary (float=0) – Boundary distance to extend the mesh in x and y direction.
area (float=1e5) – Maximum area constraint for cells.
depth (float=0) – Depth of the mesh in z direction.
quality (float=1.3) – Quality factor for mesh generation.
addPLC (GIMLI::Mesh) – PLC mesh to add to the mesh.
addPoints (bool=True) – Add points from self.x and self.y to the mesh.
- Returns:
mesh – Created 3D unstructured mesh.
- Return type:
- createMeshOld(bnd: float = 0, area: float = 100000.0, depth: float = 0, quality: float = 1.3, addPLC: Mesh = None, addPoints: bool = True)[source]#
Create an unstructured 3D mesh.
- Parameters:
bnd (float=0) – Boundary distance to extend the mesh in x and y direction.
area (float=1e5) – Maximum area constraint for cells.
depth (float=0) – Depth of the mesh in z direction.
quality (float=1.3) – Quality factor for mesh generation.
addPLC (GIMLI::Mesh) – PLC mesh to add to the mesh.
addPoints (bool=True) – Add points from self.x and self.y to the mesh.
- Returns:
mesh – Created 3D unstructured mesh.
- Return type:
- detectLines(**kwargs)[source]#
Detect lines in data.
- Keyword Arguments:
mode (str|float|array) – ‘x’/’y’: along coordinate axis spacing vector: by given spacing float: minimum distance
axis (str='x') – Axis to use for line detection.
show (bool=False) – Show detected lines.
- inversion(noise_level=2, noisify=False, **kwargs)[source]#
Run Inversion (requires mesh and FOP).
- Parameters:
noise_level (float|array) – absolute noise level (absoluteError)
noisify (bool) – add noise before inversion
relativeError (float|array [0.01]) – relative error to stabilize very low data
depthWeighting (bool [True]) – apply depth weighting after Li&Oldenburg (1996)
z0 (float) – skin depth for depth weighting
mul (array) – multiply constraint weight with
- Keyword Arguments:
startModel (float|array=0.001) – Starting model (typically homogeneous)
relativeError (float=0.001) – Relative error to stabilize very low data.
lam (float=10) – regularization strength
verbose (bool=True) – Be verbose
symlogThreshold (float [0]) – Threshold for symlog data trans.
limits ([float, float]) – Lower and upper parameter limits.
C (int|Matrix|[float, float, float] [1]) – Constraint order.
C(,cType) (int|Matrix|[float, float, float]=C) – Constraint order, matrix or correlation lengths.
z0 (float=25) – Skin depth for depth weighting.
depthWeighting (bool=True) – Apply depth weighting after Li&Oldenburg (1996).
mul (float=1) – Multiply depth weighting constraint weight with this factor.
**kwargs – Additional keyword arguments for the inversion.
- Returns:
model – Model vector (also saved in self.inv.model).
- Return type:
np.array
- loadResults(folder)[source]#
Load inversion results from a folder.
- Parameters:
folder (str) – Folder to load results from.
- saveResults(folder=None)[source]#
Save inversion results to a folder.
- Parameters:
folder (str) – Folder to save results to.
- show3DModel(label: str = None, trsh: float = 0.025, synth: Mesh = None, invert: bool = False, position: str = 'yz', elevation: float = 10, azimuth: float = 25, zoom: float = 1.2, **kwargs)[source]#
Show standard 3D view.
- Parameters:
label (str='sus') – Label for the mesh data to visualize.
trsh (float=0.025) – Threshold for the mesh data to visualize.
synth (GIMLI::Mesh [None]) – Synthetic model to visualize in wireframe.
invert (bool=False) – Invert the threshold filter.
position (str="yz") – Camera position, e.g., “yz”, “xz”, “xy”.
elevation (float=10) – Camera elevation angle.
azimuth (float=25) – Camera azimuth angle.
zoom (float=1.2) – Camera zoom factor.
- Keyword Arguments:
cMin (float=0.001) – Minimum color value for the mesh data.
cMax (float=None) – Maximum color value for the mesh data. If None, it is set to the maximum value of the mesh data.
cMap (str="Spectral_r") – Colormap for the mesh data visualization.
logScale (bool=False) – Use logarithmic scale for the mesh data visualization.
kwargs – Additional keyword arguments for the pyvista plot.
- Returns:
pl – Plot widget with the 3D model visualization.
- Return type:
pyvista Plotter
- class pygimli.physics.gravimetry.MagneticsModelling(mesh=None, points=None, cmp=None, igrf=None, verbose=False)[source]#
Bases:
MeshModellingMagnetics modelling operator using Holstein (2007).
- __init__(mesh=None, points=None, cmp=None, igrf=None, verbose=False)[source]#
Set up forward operator.
- Parameters:
mesh (pygimli:mesh) – Tetrahedral or hexahedral mesh.
points (list|array of (x, y, z)) – Measuring points.
cmp ([str,]) – Component of: gx, gy, gz, TFA, Bx, By, Bz, Bxy, Bxz, Byy, Byz, Bzz
igrf (list|array of size 3 or 7) –
International geomagnetic reference field. either:
- [D, I, H, X, Y, Z, F] - declination,
inclination, horizontal field, X/Y/Z components, total field OR
- [X, Y, Z] - X/Y/Z
components OR
- [lat, lon] - latitude,
longitude (automatic by pyIGRF)
- class pygimli.physics.gravimetry.RemanentMagneticsModelling(mesh, points, cmp=None, igrf=None)[source]#
Bases:
MagneticsModellingRemanent magnetics modelling operator for arbitrary magnetization.
- __init__(mesh, points, cmp=None, igrf=None)[source]#
Set up forward operator.
- Parameters:
mesh (pygimli:mesh) – Tetrahedral or hexahedral mesh.
points (list|array of (x, y, z)) – Measuring points.
cmp ([str,]) – Component of: gx, gy, gz, TFA, Bx, By, Bz, Bxy, Bxz, Byy, Byz, Bzz
igrf (list|array of size 3 or 7) –
International geomagnetic reference field. either:
- [D, I, H, X, Y, Z, F] - declination,
inclination, horizontal field, X/Y/Z components, total field OR
- [X, Y, Z] - X/Y/Z
components OR
- [lat, lon] - latitude,
longitude (automatic by pyIGRF)